Poky manual
From ElphelWiki
Revision as of 20:14, 22 June 2016 by Oleg (talk | contribs) (→About)
Contents
Description
- Building embedded Linux image for Zynq ARMv7 platform - Elphel 10393 board
About
- Yocto Poky revision = 2.0
- Host OSes:
- Kubuntu 14.04.3 LTS x64 (until June 2016)
- Kubuntu 16.04 x64 (as of June 2016)
Required packages
- Found in Yocto Project mega-manual :
Ubuntu and Debian
sudo apt-get install gawk wget git-core diffstat unzip texinfo gcc-multilib \ build-essential chrpath socat libsdl1.2-dev xterm
Fedora
sudo dnf install gawk make wget tar bzip2 gzip python unzip perl patch \ diffutils diffstat git cpp gcc gcc-c++ glibc-devel texinfo chrpath \ ccache perl-Data-Dumper perl-Text-ParseWords perl-Thread-Queue socat \ findutils which SDL-devel xterm
OpenSUSE
sudo zypper install python gcc gcc-c++ git chrpath make wget python-xml \ diffstat makeinfo python-curses patch socat libSDL-devel xterm
CentOS
sudo yum install gawk make wget tar bzip2 gzip python unzip perl patch \ diffutils diffstat git cpp gcc gcc-c++ glibc-devel texinfo chrpath socat \ perl-Data-Dumper perl-Text-ParseWords perl-Thread-Queue SDL-devel xterm
Other dependencies
sudo apt-get install python-numpy
Output files
Found in the poky's deploy directory:
- files for rootfs in NAND Flash: poky/build/tmp/deploy/images/elphel393/nand/
- files for rootfs on MMC (micro SD card): poky/build/tmp/deploy/images/elphel393/mmc/
These names are listed as they appear in the u-boot configuration header file - actual output files have different names:
- boot.bin - u-boot as the first stage bootloader = Secondary Program Loader that boots u-boot-dtb.img
- u-boot-dtb.img - full size u-boot with a stripped device tree (cat u-boot.img some_stripped_devicetree.dtb > u-boot-dtb.img)
- devicetree.dtb - device tree with listed interfaces, zynq registers, interrupts and drivers
- uImage - kernel, drivers
- rootfs.ubifs or rootfs.tar.gz - rootfs
Boot options
Boot from micro SD card (rootfs)
- The micro SD card/adapter must be modified for this boot mode (to keep CD pin high) - only then the camera will boot
- EXT4 partition mounted as /
- Detailed instructions
Boot from NAND flash (rootfs)
- The default boot option - power on.
- A UBIFS image is written to /dev/mtd4 - is mounted as /
- Detailed instructions
Notes
- It is possible to unpack rootfs to RAM not mounting any partitions (/ in RAM, ramdisk):
- Changes are not stored
- Boot faster?
- Work faster?
- Modify env commands in the u-boot (in elphel393.h or when in the u-boot command line)
- Carefully check the actual and hardcoded images' sizes in the u-boot (elphel393.h) and the device tree (elphel393_xxx.dts) with the actual sizes.
Setup
git clone https://github.com/Elphel/elphel393.git cd elphel393 ./setup.sh dev cd poky . ./oe-init-build-env bitbake u-boot device-tree linux-xlnx core-image-elphel393
Build bootloader
bitbake u-boot-ezynq or bitbake u-boot or bitbake virtual/bootloader
Output
- poky/build/tmp/deploy/images/<machine>/boot.bin
- poky/build/tmp/deploy/images/<machine>/u-boot-dtb.img
Notes
- Since Poky 1.5.1 switched from u-boot-xlnx to u-boot - some of the u-boot-xlnx reached the upstream
- Since Poky 1.5.1 u-boot introduced Kconfig and currently (as of 2016/01/22) is still migrating from autoconf - keeping both build methods working together.
- Current u-boot uses the board's device tree blob to make a stripped version for itself - uncompiled device tree files are present in the u-boot sources
Compile devicetree
bitbake device-tree
Output
- poky/build/tmp/deploy/images/<machine>/devicetree.dtb
Build kernel
bitbake linux-xlnx or bitbake virtual/kernel
Output
- poky/build/tmp/deploy/images/<machine>/uImage (kernel)
Notes
- Kernel version is 4.0, linux-xlnx
- Device Tree Blob is compiled separately in linux-xlnx
- Uncompiled device tree files are present in the linux sources provided by linux-xlnx
Build ramdisk.image.gz
bitbake core-image-elphel393
Output
- poky/build/tmp/deploy/images/<machine>/uramdisk.image.gz (the file has *.u-boot extension after it's built)
Notes
- [FIXED] lighttpd-1.4.39, mod-cgi
compile warning:
implicit declaration of function 'chunkqueue_written'
results in lighttpd failing to start if mod-cgi is enabled:
Starting Lighttpd Web Server: 2016-01-26 18:42:17: (/data/GIT_fresh/poky/build/tmp/work/cortexa9-vfp-neon-poky-linux-gnueabi/lighttpd/1.4.36-r0/lighttpd-1.4.36/src/plugin.c.169) dlopen() failed for: /usr/lib/mod_cgi.so /usr/lib/mod_cgi.so: undefined symbol: chunkqueue_w 2016-01-26 18:42:17: (/data/GIT_fresh/poky/build/tmp/work/cortexa9-vfp-neon-poky-linux-gnueabi/lighttpd/1.4.36-r0/lighttpd-1.4.36/src/server.c.679) loading plugins finally failed lighttpd.
Note: why 1.4.36?!!
solution: exclude the 0001-mod_cgi-buffers-data-without-bound.patch from the file list that comes with the poky/meta/recipes-extended/lighttpd_1.4.39.bb
Errors
- Aborted, core dumped
- Got when tried to build gstreamer1.0-plugins-base - error in one of the packages it depends on.
- Possible reason - Kubuntu 14.04 - the system libraries are too old? The up-to-date Kubuntu release is 16.04.
- Command (example):
bitbake libxau-native
- log:
| x86_64-linux-libtool: link: ar cru .libs/libXau.a AuDispose.o AuFileName.o AuGetAddr.o AuGetBest.o AuLock.o AuRead.o AuUnlock.o AuWrite.o | *** buffer overflow detected ***: ar terminated | ======= Backtrace: ========= | /lib/x86_64-linux-gnu/libc.so.6(+0x7329f)[0x2b732eade29f] | /lib/x86_64-linux-gnu/libc.so.6(__fortify_fail+0x5c)[0x2b732eb75bbc] | /lib/x86_64-linux-gnu/libc.so.6(+0x109a90)[0x2b732eb74a90] | /lib/x86_64-linux-gnu/libc.so.6(+0x108f99)[0x2b732eb73f99] | /lib/x86_64-linux-gnu/libc.so.6(_IO_default_xsputn+0xbc)[0x2b732eae660c] | /lib/x86_64-linux-gnu/libc.so.6(_IO_padn+0xa0)[0x2b732eada600] | /lib/x86_64-linux-gnu/libc.so.6(_IO_vfprintf+0x3c4d)[0x2b732eab888d] | /lib/x86_64-linux-gnu/libc.so.6(__vsprintf_chk+0x84)[0x2b732eb74024] | /lib/x86_64-linux-gnu/libc.so.6(__sprintf_chk+0x7d)[0x2b732eb73f7d] | ar[0x406d20] | ar[0x4088df] | ar[0x40bf08] | ar[0x404a86] | ar[0x405003] | ar[0x402a45] | /lib/x86_64-linux-gnu/libc.so.6(__libc_start_main+0xf5)[0x2b732ea8cf45] | ar[0x402dc5] | ======= Memory map: ======== | 00400000-00482000 r-xp 00000000 08:01 27273645 /usr/local/bin/ar | 00682000-00683000 r--p 00082000 08:01 27273645 /usr/local/bin/ar | 00683000-00684000 rw-p 00083000 08:01 27273645 /usr/local/bin/ar | 00776000-007e0000 rw-p 00000000 00:00 0 [heap] | 2b732e846000-2b732e869000 r-xp 00000000 08:01 26740221 /lib/x86_64-linux-gnu/ld-2.19.so | 2b732e869000-2b732e86d000 rw-p 00000000 00:00 0 | 2b732e898000-2b732e89b000 rw-p 00000000 00:00 0 | 2b732ea68000-2b732ea69000 r--p 00022000 08:01 26740221 /lib/x86_64-linux-gnu/ld-2.19.so | 2b732ea69000-2b732ea6a000 rw-p 00023000 08:01 26740221 /lib/x86_64-linux-gnu/ld-2.19.so | 2b732ea6a000-2b732ea6b000 rw-p 00000000 00:00 0 | 2b732ea6b000-2b732ec25000 r-xp 00000000 08:01 26740235 /lib/x86_64-linux-gnu/libc-2.19.so | 2b732ec25000-2b732ee25000 ---p 001ba000 08:01 26740235 /lib/x86_64-linux-gnu/libc-2.19.so | 2b732ee25000-2b732ee29000 r--p 001ba000 08:01 26740235 /lib/x86_64-linux-gnu/libc-2.19.so | 2b732ee29000-2b732ee2b000 rw-p 001be000 08:01 26740235 /lib/x86_64-linux-gnu/libc-2.19.so | 2b732ee2b000-2b732ee30000 rw-p 00000000 00:00 0 | 2b732ee30000-2b732ee46000 r-xp 00000000 08:01 26741717 /lib/x86_64-linux-gnu/libgcc_s.so.1 | 2b732ee46000-2b732f045000 ---p 00016000 08:01 26741717 /lib/x86_64-linux-gnu/libgcc_s.so.1 | 2b732f045000-2b732f046000 rw-p 00015000 08:01 26741717 /lib/x86_64-linux-gnu/libgcc_s.so.1 | 7fffb978b000-7fffb97ad000 rw-p 00000000 00:00 0 [stack] | 7fffb97f8000-7fffb97fa000 r-xp 00000000 00:00 0 [vdso] | ffffffffff600000-ffffffffff601000 r-xp 00000000 00:00 0 [vsyscall] | ./x86_64-linux-libtool: line 1723: 8035 Aborted (core dumped) ar cru .libs/libXau.a AuDispose.o AuFileName.o AuGetAddr.o AuGetBest.o AuLock.o AuRead.o AuUnlock.o AuWrite.o | make[2]: *** [libXau.la] Error 134 | make[2]: Leaving directory `/GIT/elphel393/poky/build/tmp/work/x86_64-linux/libxau-native/1_1.0.8-r0/build' | make[1]: *** [all-recursive] Error 1 | make[1]: Leaving directory `/GIT/elphel393/poky/build/tmp/work/x86_64-linux/libxau-native/1_1.0.8-r0/build' | make: *** [all] Error 2 | ERROR: oe_runmake failed
Retrieved from "importwiki?title=Poky_manual&oldid=14548
Image samples
More Info
How to buy: We are directly accepting orders and ship worldwide. Please contact Elphel for Lead Time and Quotes:
NC353L series camera modules:
NC353L series cameras' overview table:
Order:
Order:
Order:
Learn more:
Order:

10353 series is a legacy product, previously used for Google Street View project
|
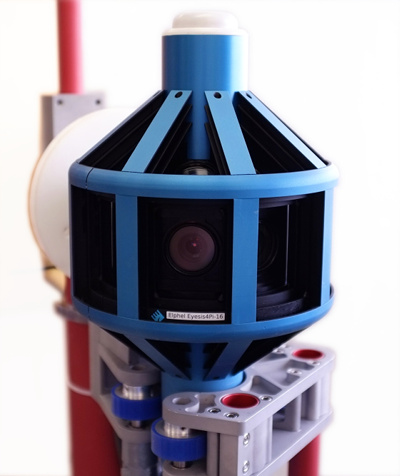
Elphel-Eyesis 4π is a panoramic and stereophotogrammetric camera that covers full sphere with the same high resolution, with it's 24 x 5Mpix sensors.
|
More Info
How to buy: We are directly accepting orders and ship worldwide. Please contact Elphel for Lead Time and Quotes:
- Email (Sales Inquiry): sales@elphel.com
- Phone: (801) 783-5555 x 107
- Eyesis4π technical support public mailing list: support-list-eyesis@support.elphel.com
NC353L series camera modules:
|
NC353L |
→ | + USB, SATA, Serial & Sync ports | → |
+ GPS receiver |
 |
+ IMU |
|||
| + Compact Flash card / Internal 1.8" HDD/SSD | ||||
| + Calibrated lens | ||||
| + Multiplexer board | → | + 2-3 sensors | ||
NC353L series cameras' overview table:
| NC353L | -PHG | -369 | -GEO | -IMU-GPS | -HDD | -PHG3 | Stereo | Hammer | |
 |
 |
 |
 |
 |
 |
 |
 |
 |
|
| ETH | + | + | + | + | + | + | + | + | + |
| USB(host) | + | + | + | + | + | + | + | ||
| SATA | + | + | + | + | + | + | + | ||
| SYNC/TRIGGER | + | + | + | + | + | + | + | ||
| CF card support | + | + | + | + | + | + | |||
| IMU | + | ||||||||
| GPS (usb or serial) | + | + | |||||||
| Internal 1.8" HDD/SSD | + | +/- | |||||||
| MUX board | 2 sensors | 2 sensors | |||||||
| Calibrated lens | + | + |
The default power supply is 48V. 12V modification is available.
Other custom modifications (e.g., add/remove modules) are available for all products. Please send your inquiries to sales@elphel.com or call 801.783.5555x107
Price list Order
Price list Order
Current sensor's (MT9P006 - 1/2.5", 5MPix, color or mono) Resolution-FPS table
| Standard | Resolution | max. FPS (Color) | max. FPS (JP4 RAW) |
| Full Resolution | 2592x1936 | 10.6 | 14 |
| 2K | 2048x1088 | 23.9 | 29.5 |
| Full HD (1080p) | 1920x1088 | 25.2 | 30.9 |
| HD (720p) | 1280x720 | 57.9 | 60 |
| PAL DV | 720x576 | 100 | 100 |
| NTSC DV | 640x480 | 126 | 126 |
| 512x512 | 129 | 129 | |
| 320x240 | 310 | 310 |
LineScan mode is available.
  Elphel 353 Camera Brochure Calibrated sensor front ends and the heptaclops camera blog article Price list |
NC353-PHG is the NC353 series network camera with a calibrated M12 (S-mount) lens and thermally compensated (<0.03um/°) sensor front end intended for use in the area of photogrammetry. Features:
Custom modifications (e.g., 12V) are available for all products. Please send your inquiries to sales@elphel.com or call 801.783.5555x107
|
|
Elphel 353 Camera Brochure Calibrated sensor front ends and the heptaclops camera blog article Matching Images Demo Price list |
NC353-369-PHG3 (NC353-369-PHG based) is 3 network cameras with calibrated M12 (S-mount) lenses and thermally compensated (<0.03um/°) sensor front ends intended for use in the area of photogrammetry. Features:
Comparison table for PHG series three-lens cameras:
Custom modifications (e.g., 12V) are available for all products. Please send your inquiries to sales@elphel.com or call 801.783.5555x107
|
||||||||||||||||||||||||||||||
Showing current products. Legacy NC353L page is moved to nc353_legacy
10393 series
Order:- Email (Sales Inquiry): sales@elphel.com
- Phone: (801) 783-5555 x 107
- Price list
 |
10393 series are high performance network multi-sensor (multi-)camera systems designed to be as flexible as possible for a wide range of machine vision applications: Features:
|
Product table
| Model name | Description | 3D model | |
| NC393-F-CS |  |
|
|
| NC393-M2260-F-CS | |
|
|
| NC393-M2260-F-CS-IMU |  |
|
|
| MNC393-XCAM |  |
|
|
| NC393-DEV | 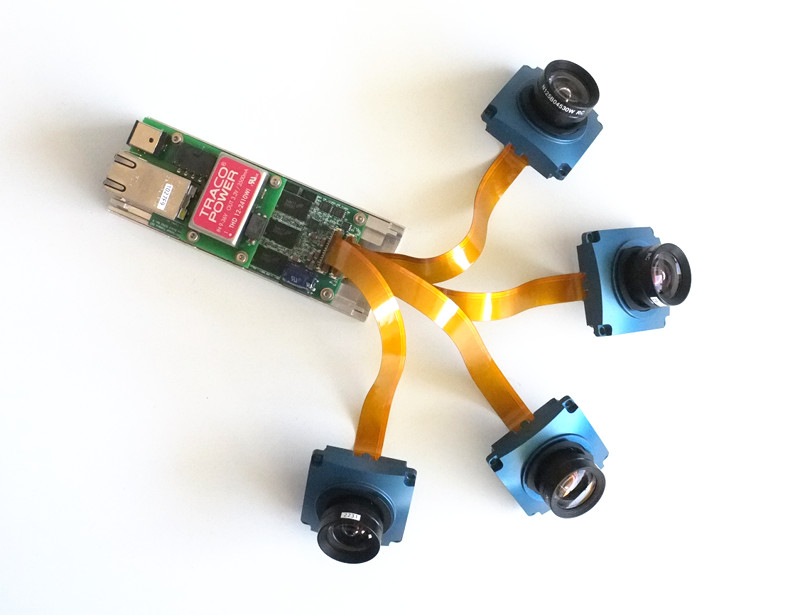 |
|
|
| NC393-H |  |
|
Order:
- Email (Sales Inquiry): sales@elphel.com
- Phone: (801) 783-5555 x 107
- Price list
 |
 |
 |
 |
|
MNC393. Customizable multi-sensor cameras. Learn more. Features:
|
|||
Order:
- Email (Sales Inquiry): sales@elphel.com
- Phone: (801) 783-5555 x 107
- Price list
|
|
NC353L-369 is a model 353 series camera capable of recording video and images to the external SATA mass storage device or internal CF cards. Serial port provides access to the root console that simplifies firmware development. Features:
|
|
Elphel 353 Camera Brochure KIT-NC353L-369 KIT-NC353L-369-12V Price list |
|
|
|
NC353L-369-GEO is a model 353 series camera for making geotagged video and images. Features:
|
|
Elphel 353 Camera Brochure Elphel 353 Camera Brochure KIT-NC353L-369-GEO Price list |
|
|
NC353L-369-HDD is a model 353 series camera with attached 1.8" for direct recording images/video. It includes:
|
|
Elphel 353 Camera Brochure KIT-NC353L-369-HDD Price list |
Order:
- Email (Sales Inquiry): sales@elphel.com
- Phone: (801) 783-5555 x 107
Learn more:
 |
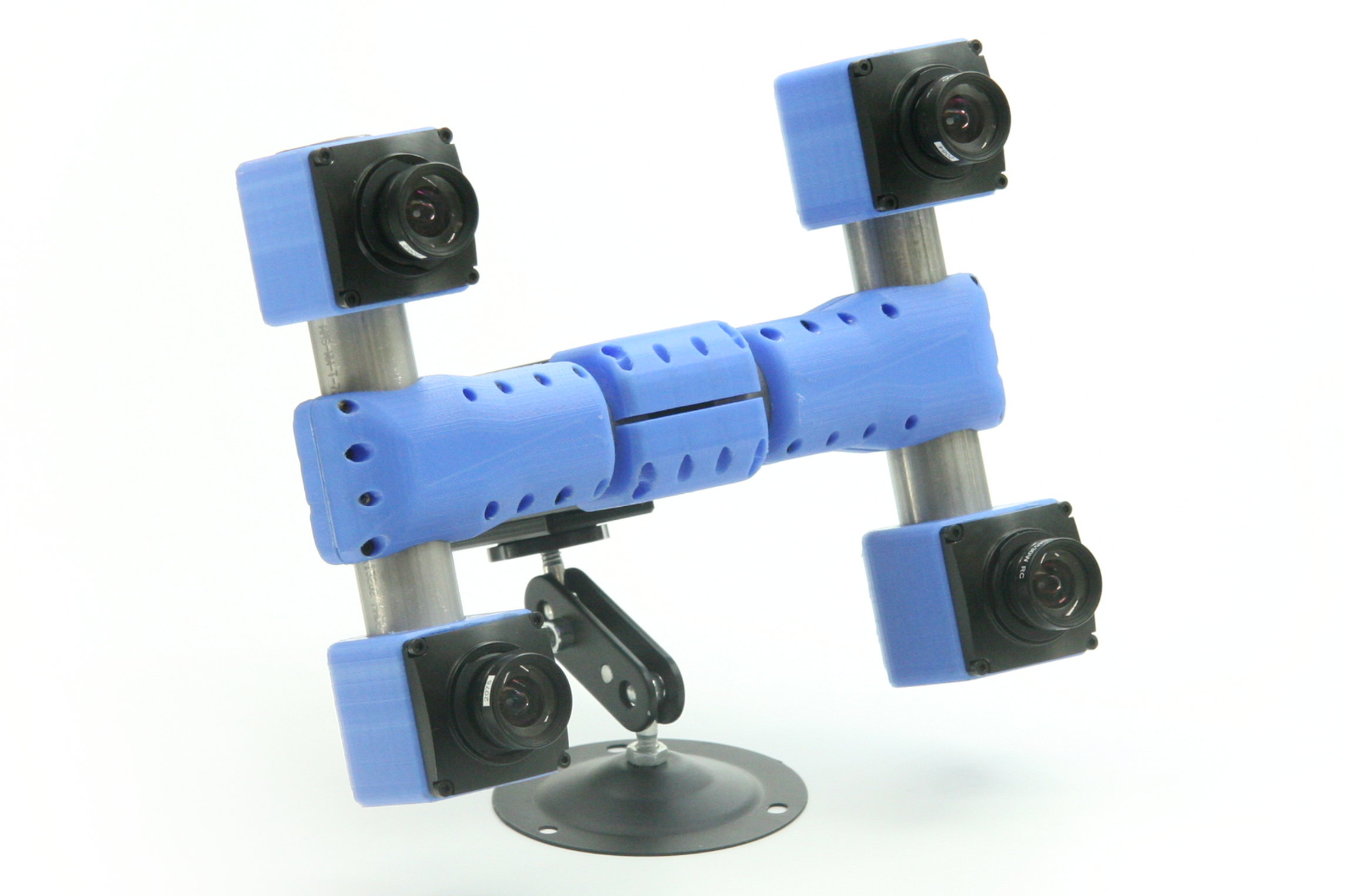
MNC393-XCAM is a Quad-sensor Stereo Camera. Applications:
More information Price list |
 |
Eyesis4Pi-393 is the newest generation of the full-sphere multi-camera systems for stereophotogrammetric applications.
Automated panoramic imagery and 3-dimensional panoramas are the 2 main applications of Eyesise4Pi-393 camera. |
|
|
|
|
|
|
MNC393. Customizable multi-sensor cameras. Learn more. Features:
|
|||
Order:
- Email (Sales Inquiry): sales@elphel.com
- Phone: (801) 783-5555 x 107
- Price list
|
|
Hammer camera setup (MNC354-2B, MNC354-2B-HDD) utilises 2 sensors front ends and the 10359 multiplexer board to record synced stereo video. Features:
|
| Elphel 353 Camera Brochure Price list |

|
NC353L-369-IMU-GPS allows to save a separate log from Inertial Measurement Unit (orientation) and a GPS receiver (USB or serial)
|
|
Elphel 353 Camera Brochure KIT-NC353L-369-IMU/GPS Price list |