File:0353-99-10.stp.tar.gz
uploaded a new version of "[[File:0353-99-10.stp.tar.gz]]"
Andrey.filippovFile:0353-98-01.stp.tar.gz
uploaded a new version of "[[File:0353-98-01.stp.tar.gz]]"
Andrey.filippovFile:0353-96-01.stp.tar.gz
uploaded a new version of "[[File:0353-96-01.stp.tar.gz]]"
Andrey.filippovElphel camera parts 0393-12
0393-12-31 - Disk springs support pin:
← Older revision Revision as of 01:43, 12 December 2015 (One intermediate revision not shown)Line 2: Line 2: {{Cad4a|0393-12-29}} {{Cad4a|0393-12-29}} ---- ---- +=== 0393-12-30 - Sensor adjustment plate === +{{Cad4a|0393-12-30}} +---- + === 0393-12-31 - Disk springs support pin === === 0393-12-31 - Disk springs support pin === {{Cad4a|0393-12-31}} {{Cad4a|0393-12-31}} +---- +=== 0393-12-43 - SFE M12 body === +{{Cad4a|0393-12-43}} +---- +=== 0393-12-44 - SFE M12 adapter === +{{Cad4a|0393-12-44}} ---- ---- MikhailElphel camera parts
0393-12 - front ends:
← Older revision Revision as of 01:41, 12 December 2015 Line 225: Line 225: === [[Elphel_camera_parts_0393-12 | 0393-12 - front ends ]] === === [[Elphel_camera_parts_0393-12 | 0393-12 - front ends ]] === ==== [[Elphel_camera_parts_0393-12#0393-12-29_-_Sensor_front_end.2C_CS-mount | 0393-12-29 - Sensor front end, CS-mount ]] ==== ==== [[Elphel_camera_parts_0393-12#0393-12-29_-_Sensor_front_end.2C_CS-mount | 0393-12-29 - Sensor front end, CS-mount ]] ==== +==== [[Elphel_camera_parts_0393-12#0393-12-30_-_Sensor_adjustment_plate | 0393-12-30 - Sensor adjustment plate ]] ==== +==== [[Elphel_camera_parts_0393-12#0393-12-31_-_Disk_springs_support_pin | 0393-12-31 - Disk springs support pin ]] ==== +==== [[Elphel_camera_parts_0393-12#0393-12-43_-_SFE_M12_body | 0393-12-43 - SFE M12 body ]] ==== +==== [[Elphel_camera_parts_0393-12#0393-12-44_-_SFE_M12_adapter | 0393-12-44 - SFE M12 adapter ]] ==== == [[Elphel_camera_parts_0353-17 | 0353-17 - decals/overlays ]] == == [[Elphel_camera_parts_0353-17 | 0353-17 - decals/overlays ]] == MikhailElphel camera parts 0393-12
0393-12-30 - Sensor adjustment plate:
← Older revision Revision as of 01:36, 12 December 2015 (One intermediate revision not shown)Line 1: Line 1: === 0393-12-29 - Sensor front end, CS-mount === === 0393-12-29 - Sensor front end, CS-mount === {{Cad4a|0393-12-29}} {{Cad4a|0393-12-29}} +---- +=== 0393-12-31 - Disk springs support pin === +{{Cad4a|0393-12-31}} ---- ---- MikhailElphel camera parts
Major camera enclosure parts:
← Older revision Revision as of 22:00, 11 December 2015 Line 222: Line 222: ---- ---- ---- ---- + +=== [[Elphel_camera_parts_0393-12 | 0393-12 - front ends ]] === +==== [[Elphel_camera_parts_0393-12#0393-12-29_-_Sensor_front_end.2C_CS-mount | 0393-12-29 - Sensor front end, CS-mount ]] ==== == [[Elphel_camera_parts_0353-17 | 0353-17 - decals/overlays ]] == == [[Elphel_camera_parts_0353-17 | 0353-17 - decals/overlays ]] == MikhailElphel camera parts 0393-12
Created page with "=== 0393-12-29 - Sensor front end, CS-mount === {{Cad4a|0393-12-29}} ----"
New page
=== 0393-12-29 - Sensor front end, CS-mount ==={{Cad4a|0393-12-29}}
---- Mikhail
10359
← Older revision
Revision as of 21:53, 8 December 2015
(One intermediate revision not shown)Line 30:
Line 30:
-===How to connect 10359 to 10353 and sensors===+===Connect 10353, 10359 and sensors===
+<font color=red>''Note: <b>FPC cables</b> we provide are not symmetrical (neither faces nor ends). Check the pictures below for correct cables connection.''</font>
+{|
+|-
+|valign='top'|[[File:10353-10359 fpc-cable.jpeg|300px|thumb|10353-10359, FPC cable]]
+| [[File:10353-10359-fpc-cable2.jpeg|300px|thumb|10353-10359-sensors, FPC cables]]
+|}
+
'''Basic:''' '''Basic:'''
* Using a standard 30-pin flex cable connect '''[[Media:10353e.pdf|10353.J1]]''' (''connector's foil wires face away from the board'') and '''[[Media:10359sch.pdf|10359.J1]]''' (''foil wires face up'') * Using a standard 30-pin flex cable connect '''[[Media:10353e.pdf|10353.J1]]''' (''connector's foil wires face away from the board'') and '''[[Media:10359sch.pdf|10359.J1]]''' (''foil wires face up'')
Oleg
10359
← Older revision
Revision as of 21:45, 8 December 2015
Line 30:
Line 30:
-===How to connect 10359 to 10353 and sensors===+===Connect 10353, 10359 and sensors===
+<font color=red>''Note: <b>FPC cables</b> we provide are not symmetrical (neither faces nor ends). Check the pictures below for correct cables connection.''</font>
+{|
+|-
+|valign='top'|[[File:10353-10359 fpc-cable.jpeg|300px|thumb|10353-10359, FPC cable]]
+| [[File:10353-10359-fpc-cable2.jpeg|300px|thumb|10353-10359-sensors, FPC cable]]
+|}
+
'''Basic:''' '''Basic:'''
* Using a standard 30-pin flex cable connect '''[[Media:10353e.pdf|10353.J1]]''' (''connector's foil wires face away from the board'') and '''[[Media:10359sch.pdf|10359.J1]]''' (''foil wires face up'') * Using a standard 30-pin flex cable connect '''[[Media:10353e.pdf|10353.J1]]''' (''connector's foil wires face away from the board'') and '''[[Media:10359sch.pdf|10359.J1]]''' (''foil wires face up'')
Oleg
File:10353-10359-fpc-cable2.jpeg
{kind=link}
uploaded "[[File:10353-10359-fpc-cable2.jpeg]]"
Oleg{kind=link}
10398
← Older revision
Revision as of 02:23, 13 November 2015
(3 intermediate revisions not shown)Line 1:
Line 1:
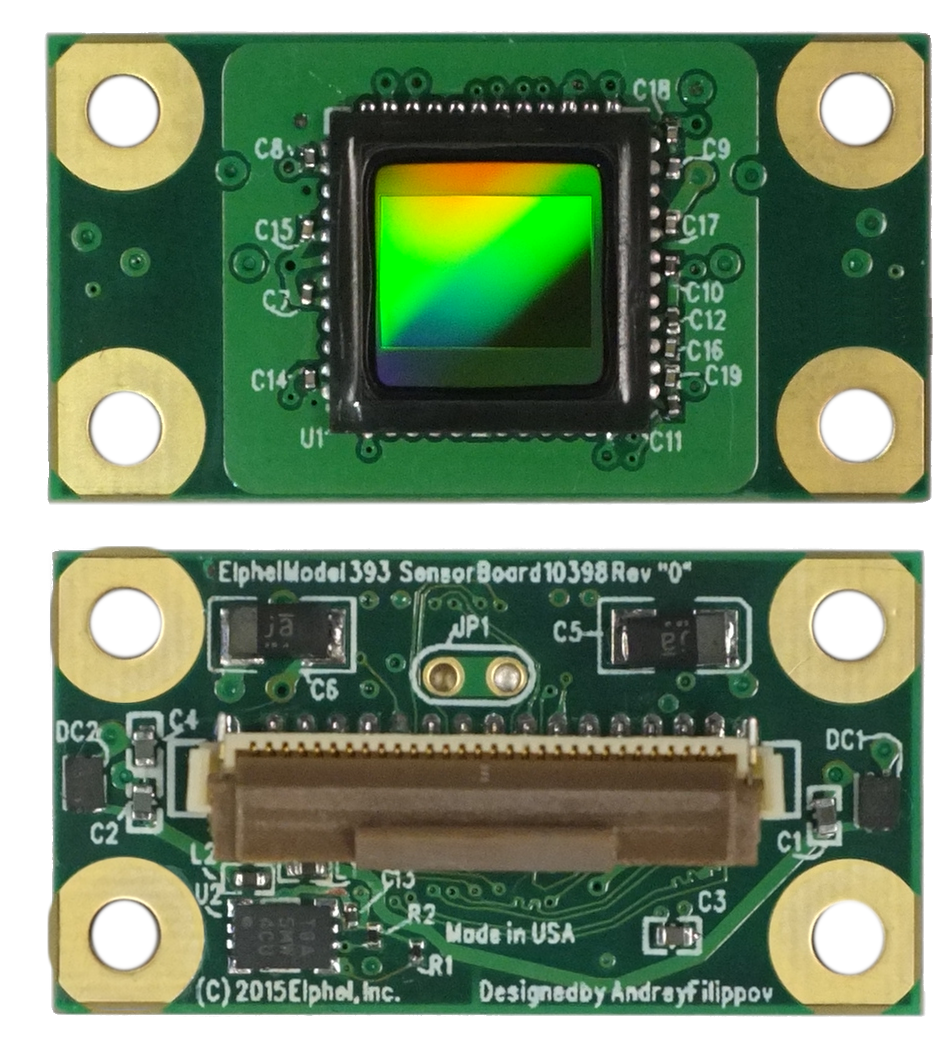
==10398== ==10398==
-[[Image:10398_top.png| thumb | 374px| 10398 board, top view]]+[[Image:10398_top.png|thumb|374px|10398 board, top view]]
-[[Image:10398_bottom.png| thumb | 374px| 10398 board, bottom view]]+[[Image:10398_bottom.png|thumb|374px|10398 board, bottom view]]
-10398 board is a 14MPix sensor front end (SFE) designed to work with [[10393]] camera system board. It has the same physical dimensions and the same optical format (1/2.3") as a 5MPix SFE [[10338D]].+10398 board is a 14MPix sensor front end (SFE) designed to work with [[10393]] camera system board. It has the same physical dimensions and the same optical format (1/2.3") as a 5MPix SFE [[10338D]] (15mm x 28mm).
-The 14MPix (4608H x 3288V, 1.4μm x1.4 μm) image sensor used is On Semiconductor (former Aptina) [http://www.onsemi.com/pub_link/Collateral/MT9F002-D.PDF |MT9F002]. This sensor (and 10398 SFE) uses 4-lane HiSPi serial interface running at 700 Mpbs/lane and is capable of running at 13.7 fps at full resolution (12bpp mode), or 60fps at 2304x1296 (1080p + 20% EIS). Other combinations of resolution/frame rate are possible.+The 14MPix (4608H x 3288V, 1.4μm x1.4 μm) image sensor used is On Semiconductor (former Aptina) [http://www.onsemi.com/pub_link/Collateral/MT9F002-D.PDF MT9F002]. This sensor (and 10398 SFE) uses 4-lane HiSPi serial interface running at 700 Mpbs/lane and is capable of running at 13.7 fps at full resolution (12bpp mode), or 60fps at 2304x1296 (1080p + 20% EIS). Other combinations of resolution/frame rate are possible.
-Up to 4 10398 SFE can be directly connected to [[10393]] system board and run simultaneously at full speed (880 pixels/s combined).+Up to 4 10398 SFE can be directly connected to [[10393]] system board and run simultaneously at full speed (880M pixels/s combined).
10398 SFE uses the same 30-pin flex cable connector for control (I²C, extra GPIO), differential data output (4-lane HiSPi+clock) and 3.3V power (additional 2.8V analog and 1.8V digital are generated on board). Short connections can use general purpose flex jumpers (30 conductors, 0.5mm pitch) or Elphel flex cables manufactured for the parallel interface sensors, longer connections require controlled-impedance flex cables with 100Ω differential lines. 10398 SFE uses the same 30-pin flex cable connector for control (I²C, extra GPIO), differential data output (4-lane HiSPi+clock) and 3.3V power (additional 2.8V analog and 1.8V digital are generated on board). Short connections can use general purpose flex jumpers (30 conductors, 0.5mm pitch) or Elphel flex cables manufactured for the parallel interface sensors, longer connections require controlled-impedance flex cables with 100Ω differential lines.
[[Media:10398.pdf|10398 Circuit Diagram, Parts List]] <br/> [[Media:10398_gerber.tar.gz|10398 Gerber files]] [[Media:10398.pdf|10398 Circuit Diagram, Parts List]] <br/> [[Media:10398_gerber.tar.gz|10398 Gerber files]]
Oleg
10393
More details:
← Older revision Revision as of 23:04, 12 November 2015 (4 intermediate revisions not shown)Line 20: Line 20: * microSD card slot - storage and system recovery * microSD card slot - storage and system recovery ====Interfaces==== ====Interfaces==== +[[File:Nc393 4sensors.jpeg|thumb|220px|10393 + 4 sensors]] * Gigabit ethernet * Gigabit ethernet * micro USB - system console, reboot, select boot device * micro USB - system console, reboot, select boot device Line 33: Line 34: *** carry 3.3VDC, 5VDC, USB, I<sup>2</sup>C and GPIO *** carry 3.3VDC, 5VDC, USB, I<sup>2</sup>C and GPIO *** support other extension boards ([[103695|IMU]], [[103696|GPS]]) *** support other extension boards ([[103695|IMU]], [[103696|GPS]]) + ====Other==== ====Other==== * Compressor bandwidth - up to <b>1 GPix/s</b> (e.g., processing 10MPix@100fps) * Compressor bandwidth - up to <b>1 GPix/s</b> (e.g., processing 10MPix@100fps) Line 59: Line 61: ==More details== ==More details== -[[Image:10393_bd.png|frame|[[Media:10393.pdf|10393 Circuit Diagram, Parts List, PCB layout]] [[Media:10393_gerber.tar.gz|10353 Gerber files]]]]+[[Image:10393_bd.png|thumb|400px|[[Media:10393.pdf|10393 Circuit Diagram, Parts List, PCB layout]] [[Media:10393_gerber.tar.gz|10353 Gerber files]]]] This camera system board is designed to simultaneously support multiple sensors - both with legacy parallel interface (it is directly compatible with [[10338|10338 Sensor board]] and [[10359|10359 Sensor multiplexer board]]) and with new high-speed serial interface (up to 8 lanes + clock per each port), such as [[10398 | 10398 14MPix SFE]]. Sensor ports of the 10393 can be combined to interface larger/higher speed sensors, interface supply voltage is programmable in the range of 1.35V to 2.8V. All the sensor port interface signals are routed directly to the FPGA pads (22 I/O signals on each of the 4 flex cable connectors) , so the same ports can be uses for other purposes, for example to control the motors or interface IMU of the quadcopter. This camera system board is designed to simultaneously support multiple sensors - both with legacy parallel interface (it is directly compatible with [[10338|10338 Sensor board]] and [[10359|10359 Sensor multiplexer board]]) and with new high-speed serial interface (up to 8 lanes + clock per each port), such as [[10398 | 10398 14MPix SFE]]. Sensor ports of the 10393 can be combined to interface larger/higher speed sensors, interface supply voltage is programmable in the range of 1.35V to 2.8V. All the sensor port interface signals are routed directly to the FPGA pads (22 I/O signals on each of the 4 flex cable connectors) , so the same ports can be uses for other purposes, for example to control the motors or interface IMU of the quadcopter. Oleg10393
← Older revision
Revision as of 21:43, 12 November 2015
(2 intermediate revisions not shown)Line 20:
Line 20:
* microSD card slot - storage and system recovery * microSD card slot - storage and system recovery
====Interfaces==== ====Interfaces====
+[[File:Nc393 4sensors.jpeg|thumb|220px|10393 + 4 sensors]]
* Gigabit ethernet * Gigabit ethernet
* micro USB - system console, reboot, select boot device * micro USB - system console, reboot, select boot device
Line 33:
Line 34:
*** carry 3.3VDC, 5VDC, USB, I<sup>2</sup>C and GPIO *** carry 3.3VDC, 5VDC, USB, I<sup>2</sup>C and GPIO
*** support other extension boards ([[103695|IMU]], [[103696|GPS]]) *** support other extension boards ([[103695|IMU]], [[103696|GPS]])
+
====Other==== ====Other====
* Compressor bandwidth - up to <b>1 GPix/s</b> (e.g., processing 10MPix@100fps) * Compressor bandwidth - up to <b>1 GPix/s</b> (e.g., processing 10MPix@100fps)
Oleg
File:Nc393 4sensors.jpeg
{kind=link}
uploaded "[[File:Nc393 4sensors.jpeg]]"
Oleg{kind=link}
10393
← Older revision
Revision as of 21:25, 12 November 2015
(One intermediate revision not shown)Line 1:
Line 1:
+==About==
[[Image:10393_top_sm.png|frame|[[Media:10393_top.jpeg|10393 board, top view]]]] [[Image:10393_top_sm.png|frame|[[Media:10393_top.jpeg|10393 board, top view]]]]
[[Image:10393_bottom_sm.png|frame|[[Media:10393_bottom.jpeg|10393 board, bottom view]]]] [[Image:10393_bottom_sm.png|frame|[[Media:10393_bottom.jpeg|10393 board, bottom view]]]]
-[[Image:10393_bd.png|frame|[[Media:10393.pdf|10393 Circuit Diagram, Parts List, PCB layout]] [[Media:10393_gerber.tar.gz|10353 Gerber files]]]]
10393 is the system board of Elphel NC393 series camera. It will also replace [[10353|10353 board]] in [[Elphel_Eyesis4Pi|Eyesis4pi]] and other Elphel multi-sensor cameras. It has the same physical dimensions as 10353 and may be used as an upgrade to the previous camera modules. 10393 is the system board of Elphel NC393 series camera. It will also replace [[10353|10353 board]] in [[Elphel_Eyesis4Pi|Eyesis4pi]] and other Elphel multi-sensor cameras. It has the same physical dimensions as 10353 and may be used as an upgrade to the previous camera modules.
+==Overview==
+====Operating System====
+* OpenEmbedded Linux (built with [https://www.yoctoproject.org/tools-resources/projects/poky Yocto Poky])
+====Processor====
+* Xilinx Zynq 7030 SoC
+** Dual-core ARM Cortex-A9 + FPGA
+** 800MHz
+====Supported Image Sensors====
+* [http://www.onsemi.com/PowerSolutions/product.do?id=MT9P006 MT9P006] - 5MPix 1/2.5" CMOS
+* [http://www.onsemi.com/PowerSolutions/product.do?id=MT9F002 MT9F002] - 14MPix 1/2.3" CMOS
+====Memory and Storage====
+* 1.0 GB DDR3 memory - system RAM
+* 0.5 GB DDR3 memory - FPGA RAM
+* 0.5 GB NAND flash - program storage
+* microSD card slot - storage and system recovery
+====Interfaces====
+* Gigabit ethernet
+* micro USB - system console, reboot, select boot device
+* 4x sensor ports - routed to FPGA, each reconfigurable for general multi-purpose use
+* Added by [[10389|10389 Extension board]]:
+** USB2.0 (host)
+** eSATA + USB port
+** M.2 SATA port
+** External synchronization (master or slave):
+*** 2.5mm audio
+*** 4-conductor flex cable
+** 2x 10-conductor flex cable ports
+*** carry 3.3VDC, 5VDC, USB, I<sup>2</sup>C and GPIO
+*** support other extension boards ([[103695|IMU]], [[103696|GPS]])
+====Other====
+* Compressor bandwidth - up to <b>1 GPix/s</b> (e.g., processing 10MPix@100fps)
+* Image formats: JPEG, JP4, RAW (coming)
+* Wake-up on alarm
+====Power====
+* 3.3VDC
+====Dimensions====
+* 96x38 mm
+
+====SDK====
+* Firmware:
+** [https://eclipse.org Eclipse IDE] + [https://github.com/Elphel/vdt-plugin VDT-Plugin]
+** [http://www.xilinx.com/products/design-tools/vivado.html Vivado WebPACK Edition]
+** [http://iverilog.icarus.com/ IVerilog]
+** [http://gtkwave.sourceforge.net/ GTKWave]
+* Software (Kernel and Applications):
+** [https://eclipse.org Eclipse IDE]
+** [https://www.yoctoproject.org/tools-resources/projects/poky Yocto Poky]
+* Sources:
+** [https://github.com/Elphel GitHub/Elphel]
+
+====License====
+* [http://www.ohwr.org/projects/cernohl CERN OHLv1.1+]
+* [http://www.gnu.org/licenses/gpl.html GPLv3+]
+
+==More details==
+[[Image:10393_bd.png|frame|[[Media:10393.pdf|10393 Circuit Diagram, Parts List, PCB layout]] [[Media:10393_gerber.tar.gz|10353 Gerber files]]]]
This camera system board is designed to simultaneously support multiple sensors - both with legacy parallel interface (it is directly compatible with [[10338|10338 Sensor board]] and [[10359|10359 Sensor multiplexer board]]) and with new high-speed serial interface (up to 8 lanes + clock per each port), such as [[10398 | 10398 14MPix SFE]]. Sensor ports of the 10393 can be combined to interface larger/higher speed sensors, interface supply voltage is programmable in the range of 1.35V to 2.8V. All the sensor port interface signals are routed directly to the FPGA pads (22 I/O signals on each of the 4 flex cable connectors) , so the same ports can be uses for other purposes, for example to control the motors or interface IMU of the quadcopter. This camera system board is designed to simultaneously support multiple sensors - both with legacy parallel interface (it is directly compatible with [[10338|10338 Sensor board]] and [[10359|10359 Sensor multiplexer board]]) and with new high-speed serial interface (up to 8 lanes + clock per each port), such as [[10398 | 10398 14MPix SFE]]. Sensor ports of the 10393 can be combined to interface larger/higher speed sensors, interface supply voltage is programmable in the range of 1.35V to 2.8V. All the sensor port interface signals are routed directly to the FPGA pads (22 I/O signals on each of the 4 flex cable connectors) , so the same ports can be uses for other purposes, for example to control the motors or interface IMU of the quadcopter.
Oleg
10393
← Older revision
Revision as of 21:18, 12 November 2015
Line 2:
Line 2:
[[Image:10393_bottom_sm.png|frame|[[Media:10393_bottom.jpeg|10393 board, bottom view]]]] [[Image:10393_bottom_sm.png|frame|[[Media:10393_bottom.jpeg|10393 board, bottom view]]]]
[[Image:10393_bd.png|frame|[[Media:10393.pdf|10393 Circuit Diagram, Parts List, PCB layout]] [[Media:10393_gerber.tar.gz|10353 Gerber files]]]] [[Image:10393_bd.png|frame|[[Media:10393.pdf|10393 Circuit Diagram, Parts List, PCB layout]] [[Media:10393_gerber.tar.gz|10353 Gerber files]]]]
+
+==About==
10393 is the system board of Elphel NC393 series camera. It will also replace [[10353|10353 board]] in [[Elphel_Eyesis4Pi|Eyesis4pi]] and other Elphel multi-sensor cameras. It has the same physical dimensions as 10353 and may be used as an upgrade to the previous camera modules. 10393 is the system board of Elphel NC393 series camera. It will also replace [[10353|10353 board]] in [[Elphel_Eyesis4Pi|Eyesis4pi]] and other Elphel multi-sensor cameras. It has the same physical dimensions as 10353 and may be used as an upgrade to the previous camera modules.
+==Overview==
+====Operating System====
+* OpenEmbedded Linux (built with [https://www.yoctoproject.org/tools-resources/projects/poky Yocto Poky])
+====Processor====
+* Xilinx Zynq 7030 SoC
+** Dual-core ARM Cortex-A9 + FPGA
+** 800MHz
+====Supported Image Sensors====
+* [http://www.onsemi.com/PowerSolutions/product.do?id=MT9P006 MT9P006] - 5MPix 1/2.5" CMOS
+* [http://www.onsemi.com/PowerSolutions/product.do?id=MT9F002 MT9F002] - 14MPix 1/2.3" CMOS
+====Memory and Storage====
+* 1.0 GB DDR3 memory - system RAM
+* 0.5 GB DDR3 memory - FPGA RAM
+* 0.5 GB NAND flash - program storage
+* microSD card slot - storage and system recovery
+====Interfaces====
+* Gigabit ethernet
+* micro USB - system console, reboot, select boot device
+* 4x sensor ports - routed to FPGA, each reconfigurable for general multi-purpose use
+* Added by [[10389|10389 Extension board]]:
+** USB2.0 (host)
+** eSATA + USB port
+** M.2 SATA port
+** External synchronization (master or slave):
+*** 2.5mm audio
+*** 4-conductor flex cable
+** 2x 10-conductor flex cable ports
+*** carry 3.3VDC, 5VDC, USB, I<sup>2</sup>C and GPIO
+*** support other extension boards ([[103695|IMU]], [[103696|GPS]])
+====Other====
+* Compressor bandwidth - up to <b>1 GPix/s</b> (e.g., processing 10MPix@100fps)
+* Image formats: JPEG, JP4, RAW (coming)
+* Wake-up on alarm
+====Power====
+* 3.3VDC
+====Dimensions====
+* 96x38 mm
+
+====SDK====
+* Firmware:
+** [https://eclipse.org Eclipse IDE] + [https://github.com/Elphel/vdt-plugin VDT-Plugin]
+** [http://www.xilinx.com/products/design-tools/vivado.html Vivado WebPACK Edition]
+** [http://iverilog.icarus.com/ IVerilog]
+** [http://gtkwave.sourceforge.net/ GTKWave]
+* Software (Kernel and Applications):
+** [https://eclipse.org Eclipse IDE]
+** [https://www.yoctoproject.org/tools-resources/projects/poky Yocto Poky]
+* Sources:
+** [https://github.com/Elphel GitHub/Elphel]
+
+====License====
+* [http://www.ohwr.org/projects/cernohl CERN OHLv1.1+]
+* [http://www.gnu.org/licenses/gpl.html GPLv3+]
+
+
+
+==More details==
This camera system board is designed to simultaneously support multiple sensors - both with legacy parallel interface (it is directly compatible with [[10338|10338 Sensor board]] and [[10359|10359 Sensor multiplexer board]]) and with new high-speed serial interface (up to 8 lanes + clock per each port), such as [[10398 | 10398 14MPix SFE]]. Sensor ports of the 10393 can be combined to interface larger/higher speed sensors, interface supply voltage is programmable in the range of 1.35V to 2.8V. All the sensor port interface signals are routed directly to the FPGA pads (22 I/O signals on each of the 4 flex cable connectors) , so the same ports can be uses for other purposes, for example to control the motors or interface IMU of the quadcopter. This camera system board is designed to simultaneously support multiple sensors - both with legacy parallel interface (it is directly compatible with [[10338|10338 Sensor board]] and [[10359|10359 Sensor multiplexer board]]) and with new high-speed serial interface (up to 8 lanes + clock per each port), such as [[10398 | 10398 14MPix SFE]]. Sensor ports of the 10393 can be combined to interface larger/higher speed sensors, interface supply voltage is programmable in the range of 1.35V to 2.8V. All the sensor port interface signals are routed directly to the FPGA pads (22 I/O signals on each of the 4 flex cable connectors) , so the same ports can be uses for other purposes, for example to control the motors or interface IMU of the quadcopter.
Oleg
NC393 progress update: 14MPix Sensor Front End is up and running
{kind=link}
10398 Sensor Front End with 14MPix MT9F002
Sensors (ON Semiconductor MT9F002) and blank PCBs arrived in time and so I was able to hand-assemble two 10398 boards and start testing them. I had some minor problems getting data output from the first board, but it turned out to be just my bad soldering of the sensor, the second board worked immediately. To my surprise I did not have any problems with HiSPi decoder that I simulated using the sensor model I wrote myself from the documentation, so the color bar test pattern appeared almost immediately, followed by the real acquired images. I kept most of the sensor settings unmodified from the default values, just selected the correct PLL multiplier, output signal levels (1.8V HiVCM – compatible with the FPGA) and packetized format, the only other registers I had to adjust manually were exposure and color analog gains.
As it was reasonable to expect, sensitivity of the 14MPix sensor is lower than that of the 5MPix MT9P006 – our initial estimate is that it is 4 times lower, but this needs more careful measurements to find out exposure required for pixel saturation with the same illumination. Analog channel gains for both sensors we set slightly higher than minimal ones for the saturation, but such rough measurements could easily miss a factor of 1.5. MT9F002 offers more controls over the signal chain gains, but any (even analog) gain in the chain that boosts signal above the minimal needed for saturation proportionally reduces used “well capacity”, while I expect the Full Well Capacity (FWC) is already not very high for the 1.4μm x1.4 μm pixel sensor. And decrease in the number of electrons stored in a pixel accordingly increases the relative shot noise that reveals itself in the highlight areas. We will need to accurately measure FWC of the MT9F002 and have better sensitivity comparison, including that of the binned mode, but I expect to find out that 5MPix sensor are not obsolete yet and for some applications may still have advantages over the newer sensors.
{kind=link}
Image acquired with 5 MPix MT9P006 sensor, 1/2000 s
{kind=link}
Image acquired with 14MPix MT9F002 sensor, 1/500 s
Both sensors used identical f=4.5mm F3.0 lenses, the 5MPix one lens is precisely adjusted during calibration, the lens of the 14MPix sensor is just attached and focused by hand using the lens thread, no tilt correction was performed. Both images are saved at 100% JPEG quality (lossless compression) to eliminate compression artifacts, both used in-camera simple 3×3 demosaic algorithm. The 14 MPix image has visible checkerboard pattern caused by the difference of the 2 green values (green in red row, and green in the blue row). I’ll check that it is not caused by some FPGA code bug I might introduce (save as raw image and do de-bayer on a host computer), but it may also be caused by pixel cross-talk in the sensor. In any case it is possible to compensate or at least significantly reduce in the output data.
MT9F002 transmits data over 5 differential 100Ω pairs: 1 clock pair and 4 data lanes. For the initial tests I used our regular 70mm flex cable used for the parallel interface sensors, and just soldered 5 of 100Ω resistors to the contacts at the camera side end. It did work and I did not even have to do any timing adjustments of the differential lanes. We’ll do such adjustments in the future to get to the centers of the data windows – both the sensor and the FPGA code have provisions for that. The physical 100Ω load resistors were needed as it turned out that Xilinx Zynq has on-chip differential termination only for the 2.5V (or higher) supply voltages on the regular (not “high performance”) I/Os and this application uses 1.8V interface power – I missed this part of documentation and assumed that all the differential inputs have possibility to turn on differential termination. 660 Mbps/lane data rate is not too high and I expect that it will be possible to use short cables with no load resistors at all, adding such resistors to the 10393 board is not an option as it has to work with both serial and parallel sensor interfaces. Simultaneously we designed and placed an order for dedicated flex cables 150mm long, if that will work out we’ll try longer (450mm) controlled impedance cables.
File:10398.pdf
deleted "[[File:10398.pdf]]" Deleted old revision 20151112064946!10398.pdf: obsolete
Andrey.filippov10398
← Older revision
Revision as of 03:15, 12 November 2015
(One intermediate revision not shown)Line 6:
Line 6:
The 14MPix (4608H x 3288V, 1.4μm x1.4 μm) image sensor used is On Semiconductor (former Aptina) [http://www.onsemi.com/pub_link/Collateral/MT9F002-D.PDF |MT9F002]. This sensor (and 10398 SFE) uses 4-lane HiSPi serial interface running at 700 Mpbs/lane and is capable of running at 13.7 fps at full resolution (12bpp mode), or 60fps at 2304x1296 (1080p + 20% EIS). Other combinations of resolution/frame rate are possible. The 14MPix (4608H x 3288V, 1.4μm x1.4 μm) image sensor used is On Semiconductor (former Aptina) [http://www.onsemi.com/pub_link/Collateral/MT9F002-D.PDF |MT9F002]. This sensor (and 10398 SFE) uses 4-lane HiSPi serial interface running at 700 Mpbs/lane and is capable of running at 13.7 fps at full resolution (12bpp mode), or 60fps at 2304x1296 (1080p + 20% EIS). Other combinations of resolution/frame rate are possible.
+
+Up to 4 10398 SFE can be directly connected to [[10393]] system board and run simultaneously at full speed (880 pixels/s combined).
10398 SFE uses the same 30-pin flex cable connector for control (I²C, extra GPIO), differential data output (4-lane HiSPi+clock) and 3.3V power (additional 2.8V analog and 1.8V digital are generated on board). Short connections can use general purpose flex jumpers (30 conductors, 0.5mm pitch) or Elphel flex cables manufactured for the parallel interface sensors, longer connections require controlled-impedance flex cables with 100Ω differential lines. 10398 SFE uses the same 30-pin flex cable connector for control (I²C, extra GPIO), differential data output (4-lane HiSPi+clock) and 3.3V power (additional 2.8V analog and 1.8V digital are generated on board). Short connections can use general purpose flex jumpers (30 conductors, 0.5mm pitch) or Elphel flex cables manufactured for the parallel interface sensors, longer connections require controlled-impedance flex cables with 100Ω differential lines.
-[[Media:10398.jpeg|10398 Circuit Diagram, Parts List]] <br/> [[Media:10398_gerber.tar.gz|10398 Gerber files]]+[[Media:10398.pdf|10398 Circuit Diagram, Parts List]] <br/> [[Media:10398_gerber.tar.gz|10398 Gerber files]]
Andrey.filippov